ROOT is NOT needed to compile or run GEARS even though the default output file format of GEARS is ROOT. It is not even needed for the analysis of the output file. Instead, one can use uproot to read the file in Python. However, it is very convenient to analyze the GEARS output data in a ROOT interactive session using TTree::Draw. The compilation of ROOT takes a long time. However, installation of pre-compiled ROOT libraries is very easy.
Install pre-compiled ROOT in Windows
Some manual modifications have to be done after installing pre-compiled ROOT in version 6. If you don’t mind, install version 5 instead. It works right after the installation. Old ROOT releases can be found at https://root.cern.ch/releases. In the installation, please don’t forget to make the following choice:
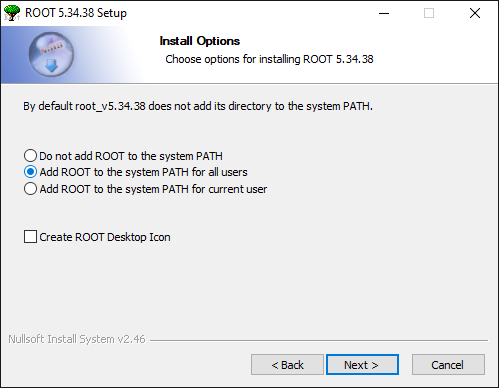
You can also choose “Add ROOT to the system PATH for current user” if you don’t have the administrator privilege.
Install pre-compiled ROOT in macOS
Homebrew includes a ROOT formula. The easiest way to install ROOT is to run
brew install root
assuming that you already have Homebrew and the full Xcode installed already.
Install pre-compiled ROOT in Linux
Please refer to https://root.cern/install/ for detailed instruction.
Docker images
Another way to obtain ROOT is to use a Docker container that has ROOT pre-installed in it. Official ROOT Docker images on https://hub.docker.com/r/rootproject/root only work on linux/amd64 architecture. Dockerfile in this folder is used to create physino/root:latest for multiple architectures, including linux/arm64 for Apple M1, M2 chips. The usage of these images can be found on https://hub.docker.com/r/physino/root.
For image creators
The procedure of creating multi-architecture images is described in detail on https://docs.docker.com/build/building/multi-platform/. The key is to create a customized builder and use it to build and push multiple images together:
# list default builder
docker buildx ls
# create a new builder
docker buildx create --name mybuilder --driver docker-container --bootstrap
# use the new builder
docker buildx use mybuilder
# inspect the new builder
docker buildx inspect
# list all builders again as well as architectures supported
docker buildx ls
# create multiple images
cd /path/to/this/folder
docker buildx build --platform linux/amd64,linux/arm64 -t physino/csi_qf_data_release:latest --push .
The Dockerfile in this folder uses fedora:latest as its base, which is a rather modern Linux distribution that has ROOT in its package repository.